Computer Vision Research Analyst
Designing a scalable camera-tracking and biomechanics simulation for competitive swimming analytics. Bridging the gap between sports science and robotics control theory.
The Challenge
Real-time swimming analysis is notoriously difficult. Underwater cameras are expensive, fixed in place, and hard to calibrate. We needed a way to prototype tracking algorithms without needing an Olympic pool.
The Solution
A full-scale Unity simulation that models swimmer biomechanics and a robotic camera rail. We used Control Barrier Functions (CBF) to guarantee the camera keeps the swimmer in frame without crashing.
Tech Stack
Simulation Environment
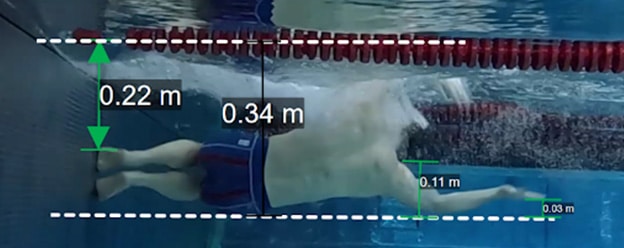
We built a 50m virtual pool with a configurable camera rail system. The swimmer object isn't just an animation—it follows parametric motion equations that mimic real stroke cycles, allowing us to generate infinite training data for CV models.
Safety-Critical Tracking
The camera needs to move fast enough to track a sprinter but smooth enough to provide stable footage. We implemented Control Barrier Functions—a robotics technique that mathematically guarantees the camera will never overshoot the rail or lose the target, even during rapid turns.
Impact & Deliverables
Scalable Tech
Alternative to expensive camera systems.
AI Analysis
Biomechanics analysis for swimmers anywhere.
Startup Base
Foundation for athlete performance tech.
Research Demo
Valid prototype for portfolio demos.